Who is Karel?
karel is an R package created with the purpose of
providing an environment that enables the teaching of programming
principles in a dynamic and interactive way, for students with no
previous experience who are studying at the secondary level or in the
early years of their undergraduate education. Karel is a robot
that lives and walks in certain worlds, in which it can perform
certain actions if we ask it to, while we learn to program in R.
The robot Karel assists in the teaching of fundamental programming
concepts, such as the processor (Karel), environment (its world),
objects (called beepers), and actions (the activities it can
perform). In addition, as can be seen in the examples of the tutorials
presented on this page, along with Karel, it is possible to instruct on
the concept of algorithmic decomposition: on numerous occasions, the
robot must fulfill objectives whose resolution requires breaking down
the problem into smaller parts, for each of which students must program
a function in R. It also facilitates the exemplification of the use of
sequential code control structures, conditionals
(if () {} else {}), and iterative structures
(for () {}, while () {}).
The first step to programming with Karel is to generate a
world in which it can move, using the instruction
generate_world(), specifying the name of the world we want
to use within the parentheses. The package includes a few predefined
worlds, but users can choose to create new ones.
All of Karel’s worlds are rectangular, composed of streets that run
horizontally (rows) and vertical avenues (columns). Karel is always
located at the intersection of a street and an avenue (cell), facing one
of the four possible directions: east, north, west, or south. The black
borders represent walls that Karel cannot cross; it can only go around
them. Additionally, in some cells, there are one or several
beepers. Karel can traverse the world by picking up and placing
beepers; if it picks them up, it stores them in its backpack
and keeps track of how many it has. Finally, Karel can only perform the
following activities: move(), turn_left(),
pick_beeper() (pick up coso), and
put_beeper(). However, by cleverly combining these basic
actions, new ones can be created. For example, a function
turn_right() can be created by making Karel turn left three
times. Furthermore, Karel is capable of evaluating certain
characteristics of its environment through functions that return a
logical value TRUE or FALSE, for example:
front_is_clear() (front open),
beepers_present() or facing_south(). This
allows us to condition the actions that Karel performs based on certain
aspects of its position and its world. Once the code with all the
actions that Karel must perform is executed, the function
run_actions() must be run, and the result can be seen in an
animation created with the ggplot and
gganimate packages.
In order to overcome some of the language barriers that can make
taking the first steps in learning programming more challenging, the
karel package was designed to be completely bilingual: all
functions have a version in Spanish and English (for example,
girar_izquierda() and turn_left()), and the
help manual pages and some website pages are written in both
languages.
The idea for the implementation of this package is based on Karel the Robot, a programming language created for educational purposes by Dr. R. E. Pattis from Stanford University (California, USA), who also wrote the book Karel the Robot: A Gentle Introduction to the Art of Programming in 1981. Its name pays homage to Karel Capek, the Swedish writer who coined the word “robot” in his science fiction work R.U.R. (Rossum’s Universal Robots). Its syntax was based on Pascal, but over the decades, this teaching strategy has been implemented in different languages such as Java, C++, Ruby, and Python. The package presented here is the first implementation of Karel for R. Some of the examples included in the vignettes are adaptations of those published by Eric Roberts in his material Karel the robot learns Java (2005).
Installation
You can install karel from CRAN:
install.packages("karel")You can also install the development version from GitHub:
# install.packages("devtools")
devtools::install_github("mpru/karel")Examples
Can you write a program for Karel to place beepers at the vertices of the diamond it is enclosed in?
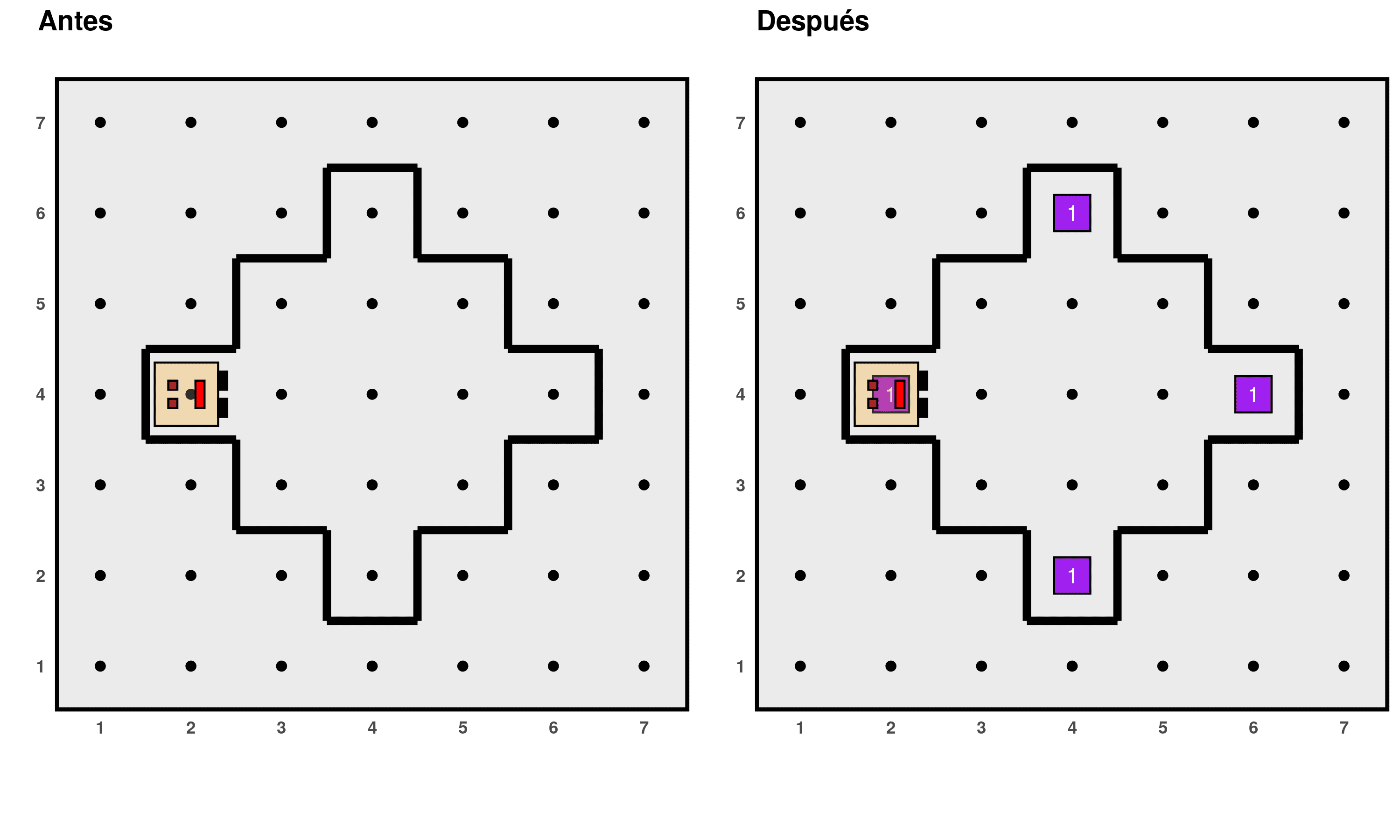
Maybe like this?
> # Load the package and Karel's superpowers
> library(karel)
> load_super_karel()
>
> # Create new functions
> walk_diagonal <- function() {
+ while (front_is_clear()) {
+ move()
+ turn_left()
+ move()
+ turn_right()
+ }
+ }
>
> # Solve the problem
> generate_world("mundo019")
> for (i in 1:4) {
+ walk_diagonal()
+ put_beeper()
+ turn_right()
+ }
> run_actions()
Now Karel is in a maze. Can we make it reach the end?
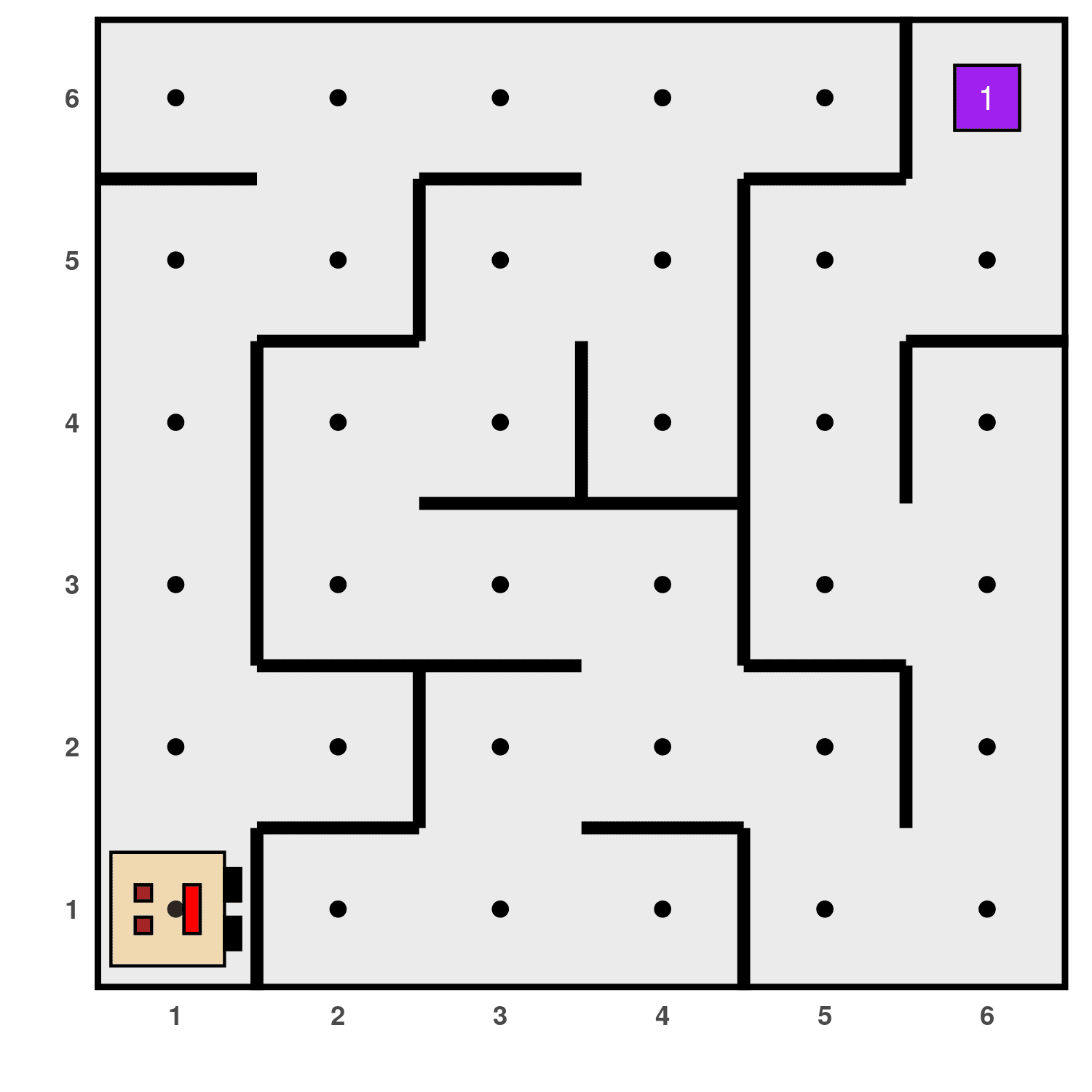
Yes, with this code:
> generate_world("mundo009")
> while (no_beepers_present()) {
+ turn_right()
+ while (front_is_blocked()) {
+ turn_left()
+ }
+ move()
+ }
> run_actions()
You can see more details about these examples and others in the tutorials section.